La demanda de posicionamiento de alta precisión crece con el avance de la conducción autónoma, los drones, la robótica y las tecnologías de gemelos digitales. Aunque la navegación GPS tradicional cubre las necesidades cotidianas, los errores de nivel métrico suelen resultar insuficientes para aplicaciones automatizadas. Por eso, la tecnología RTK, capaz de ofrecer precisión centimétrica, se está convirtiendo rápidamente en una infraestructura esencial para los dispositivos inteligentes.
Dentro del sector del posicionamiento de alta precisión, RTK se ha consolidado como tecnología clave para la topografía, la automatización agrícola, la robótica industrial y los sistemas de conducción autónoma. GEODNET aprovecha un modelo de infraestructura descentralizada para ampliar los servicios RTK desde redes regionales a escala global, llevando el posicionamiento de alta precisión a un mayor número de dispositivos y desarrolladores.
¿Qué es la tecnología de posicionamiento RTK?
RTK (Cinemática en tiempo real) es una tecnología que consigue un posicionamiento de alta precisión midiendo la fase portadora de las señales de navegación por satélite.
Los receptores GNSS estándar suelen calcular la posición directamente a partir de las señales emitidas por los satélites, con una precisión que normalmente se sitúa dentro de unos pocos metros. Sin embargo, RTK incorpora una estación base fija que calcula los errores en tiempo real y envía datos de corrección a los terminales móviles, mejorando drásticamente la precisión.
Al reducir el error de posicionamiento del nivel métrico al centimétrico, RTK se adopta ampliamente en escenarios que exigen navegación y topografía de alta precisión.
¿Por qué el GPS estándar produce errores de posicionamiento?
Los errores de posicionamiento del GPS estándar provienen de la combinación de varios factores.
Errores de órbita de satélite
Los satélites pueden sufrir desviaciones orbitales durante su funcionamiento, lo que genera imprecisiones en el cálculo de la posición.
Retardos ionosféricos y troposféricos
Las señales de satélite que atraviesan la atmósfera se ven afectadas por la ionosfera y la troposfera, lo que altera su velocidad de propagación.
Efecto multitrayecto
Las señales reflejadas por edificios, montañas o el suelo antes de llegar al receptor pueden hacer que las mediciones se desvíen de la posición real.
Errores del receptor
Las diferencias en el rendimiento del hardware y las capacidades algorítmicas de cada dispositivo también influyen en el resultado final del posicionamiento.
La acumulación de estos errores suele mantener la precisión del GPS estándar dentro de un rango de varios metros.
¿Cómo logra RTK un posicionamiento centimétrico?
El núcleo de RTK consiste en usar una estación base para ofrecer correcciones de error en tiempo real.
La estación base se instala en una coordenada perfectamente conocida, lo que le permite calcular con exactitud la diferencia entre las señales de satélite recibidas y sus valores teóricos. Estas diferencias se convierten en datos de corrección y se transmiten por red a los dispositivos móviles cercanos. Mientras recibe señales de satélite, el dispositivo móvil también recibe estos datos de corrección, eliminando así la mayoría de los errores y alcanzando una precisión centimétrica.
Este proceso suele completarse en segundos, de ahí el nombre de "posicionamiento cinemático en tiempo real".
¿Cuál es la diferencia entre GNSS, GPS y RTK?
Muchos usuarios confunden GNSS, GPS y RTK, pero estos términos operan en niveles conceptuales distintos.
GNSS es el sistema global de navegación por satélite
GNSS (Sistema global de navegación por satélite) es el término general que engloba todos los sistemas globales de navegación por satélite.
Los principales sistemas actuales incluyen:
- GPS (Estados Unidos)
- GLONASS (Rusia)
- Galileo (Unión Europea)
- BeiDou (China)
GPS es un componente de GNSS
GPS es uno de los sistemas de navegación por satélite más antiguos y utilizados.
En el lenguaje cotidiano, "navegación GPS" suele referirse a dispositivos que en realidad reciben señales de múltiples sistemas GNSS.
RTK es una tecnología de posicionamiento de alta precisión
RTK no es un sistema de satélite, sino un método de posicionamiento que realiza corrección de errores basándose en señales GNSS.
Por lo tanto, la distinción es: GNSS proporciona las señales de satélite; GPS es uno de esos sistemas GNSS; RTK utiliza esas señales para lograr un posicionamiento centimétrico.
Un sistema RTK completo suele constar de varios componentes que trabajan de forma coordinada.
Estación base
La estación base recibe continuamente señales de satélite y calcula errores.
Servidor de datos de corrección
El servidor procesa los datos de la estación base y genera información de corrección estandarizada.
Red de comunicación
Internet o un sistema de comunicación inalámbrica transmiten los datos de corrección a los dispositivos terminales.
Terminal rover
El rover es el dispositivo que utiliza el servicio de posicionamiento, como un dron, un robot o un vehículo autónomo.
Estos componentes conforman la arquitectura del servicio de posicionamiento RTK.
¿Cómo construye GEODNET una red RTK descentralizada?
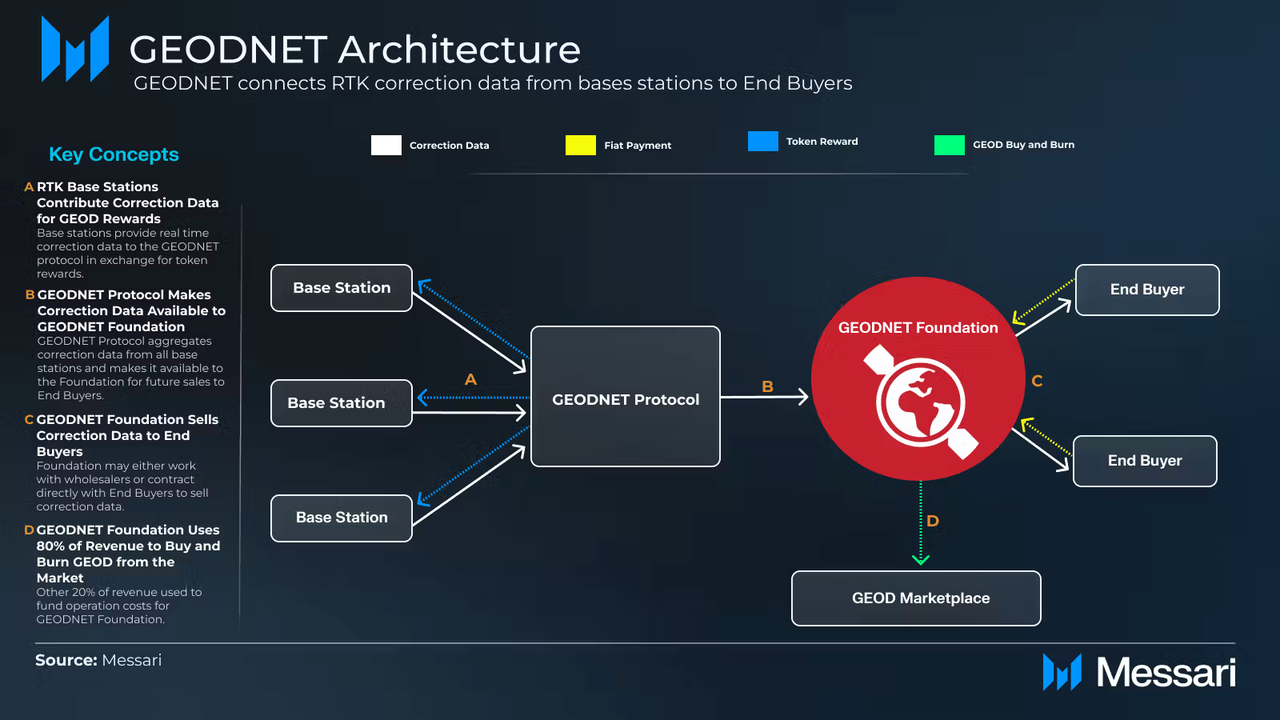
GEODNET fusiona las redes RTK tradicionales con el modelo DePIN para crear una infraestructura global de posicionamiento de alta precisión. En lugar de depender de operadores centralizados para instalar estaciones base, GEODNET permite que usuarios de todo el mundo desplieguen estaciones base GNSS y las conecten a la red. Los operadores de nodos reciben recompensas en tokens GEOD por proporcionar datos de posicionamiento de alta calidad, lo que impulsa el crecimiento continuo de la red.
Este modelo reduce los costes de infraestructura y mejora la cobertura y la eficiencia de expansión. A medida que se unen más nodos, GEODNET puede ofrecer servicios de posicionamiento de alta precisión a un número creciente de regiones.
¿Cómo funciona un proceso de posicionamiento RTK en GEODNET?
Para entender GEODNET, hay que seguir un flujo de posicionamiento completo.
Paso 1: La estación base recibe señales de satélite
Los nodos de GEODNET reciben continuamente señales de múltiples sistemas GNSS.
Paso 2: Calcular el error en tiempo real
La estación base calcula el error actual de la señal de satélite basándose en sus coordenadas conocidas.
Paso 3: Generar datos de corrección
El sistema convierte el error en información de corrección RTK estándar.
Paso 4: Enviar al dispositivo terminal
Los datos de corrección se transmiten por internet a drones, robots o vehículos.
Paso 5: El terminal completa la corrección de posicionamiento
El dispositivo utiliza los datos de corrección para calibrar las señales de satélite y lograr un posicionamiento centimétrico.
Todo este proceso se ejecuta de forma continua en tiempo real.
¿Qué industrias utilizan principalmente la tecnología RTK?
El posicionamiento de alta precisión se ha convertido en una infraestructura crítica para la transformación digital de múltiples industrias.
Conducción autónoma
Los vehículos autónomos dependen del posicionamiento centimétrico para la planificación de rutas y la detección de carriles.
Topografía con drones
Los drones de topografía emplean RTK para mejorar la precisión de mapas y modelos 3D.
Agricultura inteligente
Los tractores autónomos y los equipos de siembra de precisión necesitan navegación de alta precisión para las operaciones de campo.
Robots industriales
Los robots móviles autónomos requieren un posicionamiento preciso para el control de trayectorias y tareas colaborativas.
Computación espacial
Los sistemas de realidad aumentada y gemelos digitales necesitan datos de posición precisos para construir modelos espaciales realistas.
¿Qué desafíos enfrenta la tecnología RTK?
A pesar de su alta precisión, RTK todavía tiene limitaciones prácticas.
En primer lugar, la densidad de las estaciones base influye directamente en el rendimiento del posicionamiento. En segundo lugar, la latencia de la comunicación de red puede afectar la actualidad de los datos de corrección. Además, las obstrucciones y el efecto multitrayecto en entornos urbanos complejos pueden seguir degradando la calidad del posicionamiento. A medida que avanza la tecnología GNSS multifrecuencia y se expanden las redes globales de estaciones base, estos problemas se están mitigando gradualmente.
Conclusión
RTK es una de las tecnologías de posicionamiento de alta precisión más implementadas en la actualidad. Al corregir los errores de las señales de satélite en tiempo real, eleva la precisión del GNSS estándar del nivel métrico al centimétrico. El crecimiento de la conducción autónoma, los drones, la robótica y la agricultura inteligente ha convertido a RTK en una base indispensable para los dispositivos inteligentes en el mundo real.
GEODNET combina la tecnología RTK con el modelo DePIN y ofrece servicios de posicionamiento de alta precisión a través de una red global de estaciones base distribuidas. A diferencia de las redes RTK centralizadas tradicionales, GEODNET utiliza un enfoque impulsado por la comunidad para ampliar la cobertura de infraestructura, haciendo que el posicionamiento de alta precisión sea accesible en una gama más amplia de aplicaciones.
Preguntas frecuentes
¿Qué es la tecnología de posicionamiento RTK?
RTK (Cinemática en tiempo real) es una tecnología de navegación de alta precisión que utiliza una estación base para corregir los errores de las señales de satélite en tiempo real, logrando una precisión de posicionamiento centimétrica.
¿Cuál es la diferencia entre RTK y GPS?
GPS es un sistema de navegación por satélite, mientras que RTK es una tecnología de posicionamiento que utiliza GPS y otras señales GNSS para corregir errores. La precisión del GPS estándar suele ser de unos pocos metros; RTK alcanza una precisión centimétrica.
¿Por qué RTK es más preciso que el GPS estándar?
RTK utiliza una estación base para calcular y transmitir correcciones de error en tiempo real, eliminando las principales fuentes de error, como los errores de órbita de los satélites y los retardos atmosféricos, lo que se traduce en una precisión mucho mayor.
¿Qué tecnología de posicionamiento usa GEODNET?
GEODNET se basa principalmente en las tecnologías GNSS y RTK, proporcionando correcciones de posicionamiento en tiempo real a través de una red global de estaciones base para lograr una navegación centimétrica.
¿Cuál es la diferencia entre GEODNET y las redes RTK tradicionales?
GEODNET adopta el modelo DePIN, donde una comunidad global despliega estaciones base de forma conjunta y recibe incentivos en tokens, mientras que las redes RTK tradicionales suelen ser construidas y mantenidas de forma centralizada por agencias gubernamentales u operadores comerciales.
¿Qué dispositivos necesitan posicionamiento RTK?
Los drones, vehículos autónomos, maquinaria agrícola, robots industriales, equipos de topografía y algunos terminales de realidad aumentada y computación espacial requieren las capacidades de posicionamiento de alta precisión que ofrece RTK.