La demande de positionnement de haute précision connaît une forte augmentation avec les progrès des technologies de conduite autonome, des drones, de la robotique et des Digital Twin. Si la navigation GPS traditionnelle répond aux besoins courants, les erreurs de l'ordre du mètre s'avèrent souvent insuffisantes pour les applications automatisées. C'est pourquoi la technologie RTK, capable d'une précision centimétrique, devient rapidement une infrastructure essentielle pour les appareils intelligents.
Dans le secteur du positionnement de haute précision, le RTK s'est imposé comme une technologie clé pour la topographie, l'automatisation agricole, la robotique industrielle et les systèmes de conduite autonome. GEODNET exploite un modèle d'infrastructure décentralisé pour étendre les services RTK des réseaux régionaux à l'échelle mondiale, offrant ainsi un positionnement de haute précision à un plus large éventail d'appareils et de développeurs.
Qu'est-ce que la technologie de positionnement RTK ?
Le RTK (Real-Time Kinematic) est une technologie qui assure un positionnement de haute précision en mesurant la phase de la porteuse des signaux de navigation par satellite.
Les récepteurs GNSS standard calculent généralement la position directement à partir des signaux diffusés par les satellites, avec une précision de l'ordre de quelques mètres. Le RTK, quant à lui, introduit une station de base fixe qui calcule les erreurs en temps réel et transmet les données de correction aux terminaux mobiles, améliorant ainsi considérablement la précision du positionnement.
En faisant passer l'erreur de positionnement du niveau métrique au niveau centimétrique, le RTK est largement adopté dans les scénarios exigeant une navigation et une topographie de haute précision.
Pourquoi le GPS standard produit-il des erreurs de positionnement ?
Les erreurs de positionnement du GPS standard résultent d'une combinaison de plusieurs facteurs.
Erreurs d'orbite des satellites
Les satellites peuvent subir des déviations orbitales en cours de fonctionnement, ce qui entraîne des imprécisions dans le calcul de la position.
Retards ionosphériques et troposphériques
Les signaux satellites traversant l'atmosphère sont affectés par l'ionosphère et la troposphère, ce qui modifie leur vitesse de propagation.
Effet de trajets multiples
Les signaux réfléchis par les bâtiments, les montagnes ou le sol avant d'atteindre le récepteur peuvent donner lieu à des mesures qui s'écartent de la position réelle.
Erreurs du récepteur
Les différences de performance matérielle et de capacités algorithmiques entre les appareils influencent également le résultat final du positionnement.
L'accumulation de ces erreurs maintient généralement la précision du GPS standard dans une plage de plusieurs mètres.
Le principe fondamental du RTK consiste à utiliser une station de base pour fournir des corrections d'erreur en temps réel.
La station de base est installée à une coordonnée précisément connue, ce qui lui permet de calculer avec exactitude la différence entre les signaux satellites reçus et leurs valeurs théoriques. Ces différences sont converties en données de correction et transmises via un réseau aux appareils mobiles à proximité. Tout en recevant les signaux satellites, l'appareil mobile reçoit également ces données de correction, éliminant ainsi la plupart des erreurs et atteignant une précision centimétrique.
Ce processus s'effectue généralement en quelques secondes, d'où l'appellation « positionnement cinématique en temps réel ».
Quelle est la différence entre GNSS, GPS et RTK ?
De nombreux utilisateurs confondent GNSS, GPS et RTK, mais ces termes renvoient à des niveaux conceptuels différents.
Le GNSS est le système mondial de navigation par satellite
GNSS (Global Navigation Satellite System) est le terme générique qui désigne l'ensemble des systèmes mondiaux de navigation par satellite.
Les principaux systèmes actuellement en service sont les suivants :
- GPS (États-Unis)
- GLONASS (Russie)
- Galileo (Union européenne)
- BeiDou (Chine)
Le GPS est un composant du GNSS
Le GPS est l'un des systèmes de navigation par satellite les plus anciens et les plus répandus.
Dans le langage courant, la « navigation GPS » fait généralement référence à des appareils qui reçoivent en réalité les signaux de plusieurs systèmes GNSS.
Le RTK est une technologie de positionnement de haute précision
Le RTK n'est pas un système satellite, mais une méthode de positionnement qui effectue une correction d'erreur à partir des signaux GNSS.
Ainsi, la distinction est claire : le GNSS fournit les signaux satellites ; le GPS est l'un de ces systèmes GNSS ; le RTK utilise ces signaux pour obtenir un positionnement centimétrique.
Quels sont les composants d'un réseau RTK ?
Un système RTK complet se compose généralement de plusieurs éléments qui fonctionnent de concert.
Station de base
La station de base reçoit en continu les signaux satellites et calcule les erreurs.
Serveur de données de correction
Le serveur traite les données de la station de base et génère des informations de correction standardisées.
Réseau de communication
Internet ou un système de communication sans fil transmet les données de correction aux terminaux.
Terminal mobile
Le terminal mobile est l'appareil qui utilise le service de positionnement, comme un drone, un robot ou un véhicule autonome.
Ces éléments constituent ensemble l'architecture du service de positionnement RTK.
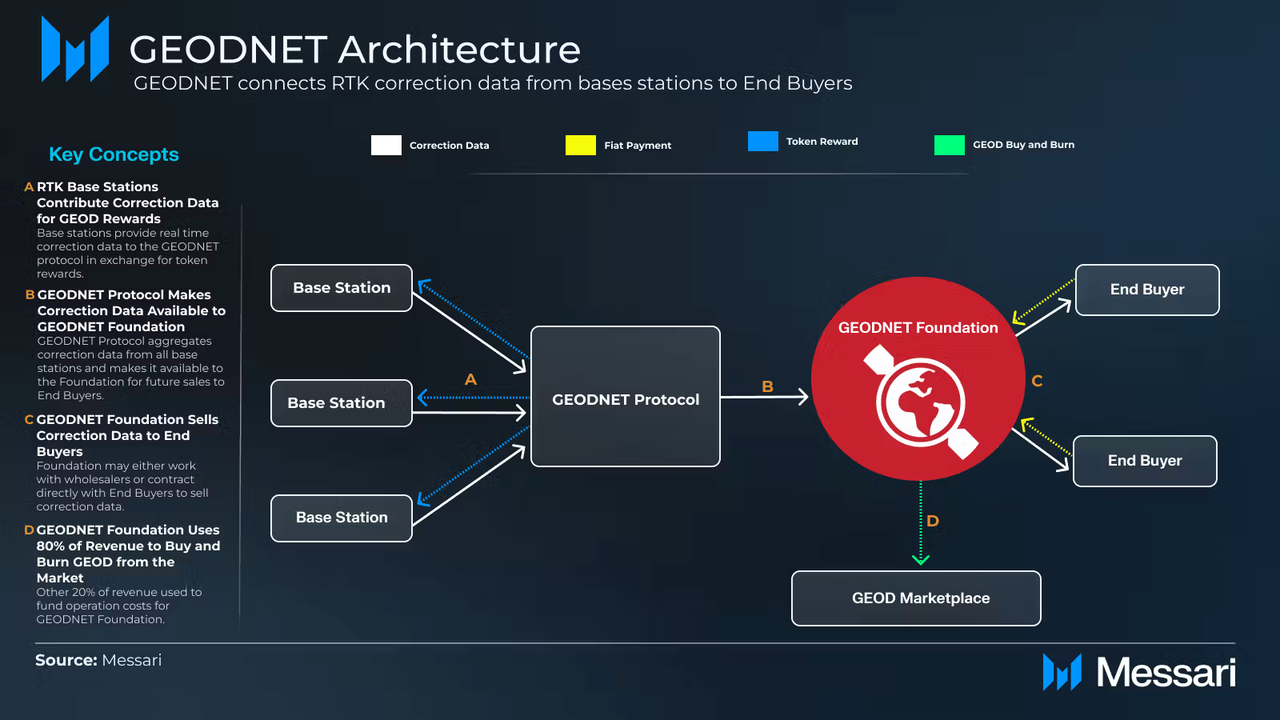
GEODNET associe les réseaux RTK traditionnels au modèle DePIN pour créer une infrastructure mondiale de positionnement de haute précision. Au lieu de s'appuyer sur des opérateurs centralisés pour déployer des stations de base, GEODNET permet aux utilisateurs du monde entier d'installer des stations de base GNSS et de les connecter au réseau. Les opérateurs de nœuds perçoivent des récompenses en Token GEOD en fournissant des données de positionnement de haute qualité, ce qui alimente la croissance continue du réseau.
Ce modèle réduit les coûts d'infrastructure tout en améliorant la couverture et l'efficacité du déploiement. À mesure que de plus en plus de nœuds rejoignent le réseau, GEODNET peut étendre ses services de positionnement de haute précision à un nombre croissant de régions.
Pour comprendre GEODNET, il suffit de suivre un flux de positionnement complet.
Étape 1 : La station de base reçoit les signaux satellites
Les nœuds GEODNET captent en continu les signaux de plusieurs systèmes GNSS.
Étape 2 : Calcul de l'erreur en temps réel
La station de base calcule l'erreur actuelle du signal satellite à partir de ses coordonnées connues.
Étape 3 : Génération des données de correction
Le système convertit l'erreur en informations de correction RTK standard.
Étape 4 : Envoi à l'appareil terminal
Les données de correction sont transmises par Internet aux drones, robots ou véhicules.
Étape 5 : Correction du positionnement par le terminal
L'appareil utilise les données de correction pour calibrer les signaux satellites, obtenant ainsi un positionnement centimétrique.
L'ensemble de ce processus s'exécute en continu en temps réel.
Quelles sont les principales industries utilisatrices de la technologie RTK ?
Le positionnement de haute précision est devenu une infrastructure essentielle pour la transformation numérique de nombreux secteurs.
Conduite autonome
Les véhicules autonomes nécessitent un positionnement centimétrique pour la planification de trajectoire et la détection de voies.
Topographie par drone
Les drones de topographie utilisent le RTK pour améliorer la précision des cartes et des modèles 3D.
Smart Agriculture
Les tracteurs autonomes et les équipements de semis de précision dépendent d'une navigation de haute précision pour leurs opérations sur le terrain.
Robots industriels
Les robots mobiles autonomes exigent un positionnement précis pour le contrôle de trajectoire et les tâches collaboratives.
Informatique spatiale
Les systèmes de réalité augmentée et de Digital Twin ont besoin de données de position précises pour construire des modèles spatiaux réalistes.
À quels défis la technologie RTK est-elle confrontée ?
Malgré sa grande précision, le RTK présente encore certaines limitations pratiques.
Tout d'abord, la densité des stations de base influe directement sur les performances de positionnement. Ensuite, la latence du réseau de communication peut compromettre l'actualité des données de correction. En outre, les obstructions et les effets de trajets multiples dans les environnements urbains complexes peuvent encore dégrader la qualité du positionnement. Avec l'avancée de la technologie GNSS multi-fréquences et l'expansion des réseaux mondiaux de stations de base, ces difficultés sont progressivement atténuées.
Conclusion
Le RTK est aujourd'hui l'une des technologies de positionnement de haute précision les plus largement déployées. En corrigeant les erreurs des signaux satellites en temps réel, il fait passer la précision standard du GNSS du niveau métrique au niveau centimétrique. L'essor de la conduite autonome, des drones, de la robotique et de la Smart Agriculture a fait du RTK un fondement incontournable pour les appareils intelligents dans le monde réel.
GEODNET associe la technologie RTK au modèle DePIN, offrant des services de positionnement de haute précision via un réseau mondial de stations de base distribuées. Contrairement aux réseaux RTK centralisés traditionnels, GEODNET adopte une approche communautaire pour étendre la couverture de son infrastructure, rendant le positionnement de haute précision accessible dans un plus grand nombre d'applications.
FAQ
Qu'est-ce que la technologie de positionnement RTK ?
Le RTK (Real-Time Kinematic) est une technologie de navigation de haute précision qui utilise une station de base pour corriger les erreurs des signaux satellites en temps réel, atteignant ainsi une précision de positionnement centimétrique.
Quelle est la différence entre RTK et GPS ?
Le GPS est un système de navigation par satellite, tandis que le RTK est une technologie de positionnement qui exploite les signaux GPS et d'autres GNSS pour la correction d'erreur. La précision standard du GPS est de l'ordre de quelques mètres ; le RTK, quant à lui, offre une précision centimétrique.
Pourquoi le RTK est-il plus précis que le GPS standard ?
Le RTK utilise une station de base pour calculer et transmettre les corrections d'erreur en temps réel, éliminant ainsi les principales sources d'erreur (orbite des satellites, retards atmosphériques), ce qui se traduit par une précision nettement supérieure.
Quelle technologie de positionnement GEODNET utilise-t-elle ?
GEODNET repose principalement sur les technologies GNSS et RTK, fournissant des corrections de positionnement en temps réel via un réseau mondial de stations de base pour assurer une navigation centimétrique.
Quelle est la différence entre GEODNET et les réseaux RTK traditionnels ?
GEODNET adopte le modèle DePIN, où une communauté mondiale déploie conjointement des stations de base et reçoit des incitations en Token, tandis que les réseaux RTK traditionnels sont généralement construits et gérés de manière centralisée par des agences gouvernementales ou des opérateurs commerciaux.
Quels appareils ont besoin du positionnement RTK ?
Les drones, les véhicules autonomes, les machines agricoles, les robots industriels, les équipements de topographie ainsi que certains terminaux de réalité augmentée et d'informatique spatiale nécessitent toutes les capacités de positionnement de haute précision qu'offre le RTK.