Permintaan untuk penentuan posisi presisi tinggi meningkat pesat seiring kemajuan teknologi kendaraan otonom, drone, robotika, dan digital twin. Meskipun navigasi GPS tradisional sudah memenuhi kebutuhan sehari-hari, kesalahan tingkat meter sering kali tidak memadai untuk aplikasi otomatis. Akibatnya, teknologi RTK—yang mampu mencapai akurasi hingga sentimeter—dengan cepat menjadi infrastruktur penting bagi perangkat pintar.
Dalam industri penentuan posisi presisi tinggi, RTK telah menjadi teknologi inti untuk survei, otomatisasi pertanian, robotika industri, dan sistem kendaraan otonom. GEODNET memanfaatkan model infrastruktur terdesentralisasi untuk memperluas layanan RTK dari jaringan regional ke skala global, memberikan penentuan posisi presisi tinggi ke lebih banyak perangkat dan pengembang.
Apa Itu Teknologi Penentuan Posisi RTK?
RTK (Real-Time Kinematic) adalah teknologi yang mencapai penentuan posisi presisi tinggi dengan mengukur fase pembawa sinyal navigasi satelit.
Penerima GNSS standar biasanya menghitung posisi langsung dari sinyal siaran satelit, dengan akurasi biasanya dalam beberapa meter. Namun, RTK memperkenalkan stasiun basis tetap yang menghitung kesalahan secara real time dan mengirimkan data koreksi ke terminal bergerak, sehingga secara dramatis meningkatkan akurasi penentuan posisi.
Dengan mengurangi kesalahan penentuan posisi dari tingkat meter ke tingkat sentimeter, RTK diadopsi secara luas dalam skenario yang membutuhkan navigasi dan survei presisi tinggi.
Mengapa GPS Standar Menghasilkan Kesalahan Penentuan Posisi?
Kesalahan penentuan posisi GPS standar berasal dari kombinasi beberapa faktor.
Kesalahan Orbit Satelit
Satelit dapat mengalami deviasi orbit selama operasi, menyebabkan ketidakakuratan dalam perhitungan posisi.
Penundaan Ionosfer Dan Troposfer
Sinyal satelit yang melewati atmosfer dipengaruhi oleh ionosfer dan troposfer, sehingga mengubah kecepatan propagasinya.
Efek Multipath
Sinyal yang dipantulkan oleh bangunan, gunung, atau tanah sebelum mencapai penerima dapat menyebabkan pengukuran menyimpang dari posisi sebenarnya.
Kesalahan Penerima
Perbedaan kinerja perangkat keras dan kemampuan algoritmik di berbagai perangkat juga memengaruhi hasil penentuan posisi akhir.
Kumpulan kesalahan ini biasanya membuat akurasi GPS standar berada dalam kisaran beberapa meter.
Bagaimana RTK Mencapai Penentuan Posisi Tingkat Sentimeter?
Inti RTK terletak pada penggunaan stasiun basis untuk memberikan koreksi kesalahan secara real time.
Stasiun basis dipasang pada koordinat yang diketahui secara presisi, sehingga dapat menghitung secara akurat perbedaan antara sinyal satelit yang diterima dan nilai teoritisnya. Perbedaan ini diubah menjadi data koreksi dan dikirim melalui jaringan ke perangkat bergerak di sekitarnya. Saat menerima sinyal satelit, perangkat bergerak juga menerima data koreksi ini, sehingga menghilangkan sebagian besar kesalahan dan mencapai akurasi tingkat sentimeter.
Proses ini biasanya selesai dalam hitungan detik, sehingga disebut "penentuan posisi kinematik real-time".
Apa Perbedaan Antara GNSS, GPS, dan RTK?
Banyak pengguna mencampuradukkan GNSS, GPS, dan RTK, padahal ketiga istilah ini berada pada tingkat konseptual yang berbeda.
GNSS Adalah Sistem Satelit Navigasi Global
GNSS (Global Navigation Satellite System) adalah istilah payung untuk semua sistem satelit navigasi global.
Sistem utama saat ini meliputi:
- GPS (Amerika Serikat)
- GLONASS (Rusia)
- Galileo (Uni Eropa)
- BeiDou (China)
GPS Adalah Komponen GNSS
GPS adalah salah satu sistem navigasi satelit paling awal dan paling banyak digunakan.
Dalam bahasa sehari-hari, "navigasi GPS" biasanya merujuk pada perangkat yang sebenarnya menerima sinyal dari beberapa sistem GNSS.
RTK Adalah Teknologi Penentuan Posisi Presisi Tinggi
RTK bukanlah sistem satelit, melainkan metode penentuan posisi yang melakukan koreksi kesalahan berdasarkan sinyal GNSS.
Jadi, perbedaannya: GNSS menyediakan sinyal satelit; GPS adalah salah satu sistem GNSS tersebut; RTK menggunakan sinyal-sinyal itu untuk mencapai penentuan posisi tingkat sentimeter.
Komponen apa saja yang membentuk jaringan RTK?
Sistem RTK yang lengkap biasanya terdiri dari beberapa komponen yang bekerja bersama.
Stasiun Basis
Stasiun basis terus menerima sinyal satelit dan menghitung kesalahan.
Server Data Koreksi
Server memproses data stasiun basis dan menghasilkan informasi koreksi yang terstandarisasi.
Jaringan Komunikasi
Internet atau sistem komunikasi nirkabel mengirimkan data koreksi ke perangkat terminal.
Terminal Rover
Rover adalah perangkat yang menggunakan layanan penentuan posisi—seperti drone, robot, atau kendaraan otonom.
Komponen-komponen ini bersama-sama membentuk arsitektur layanan penentuan posisi RTK.
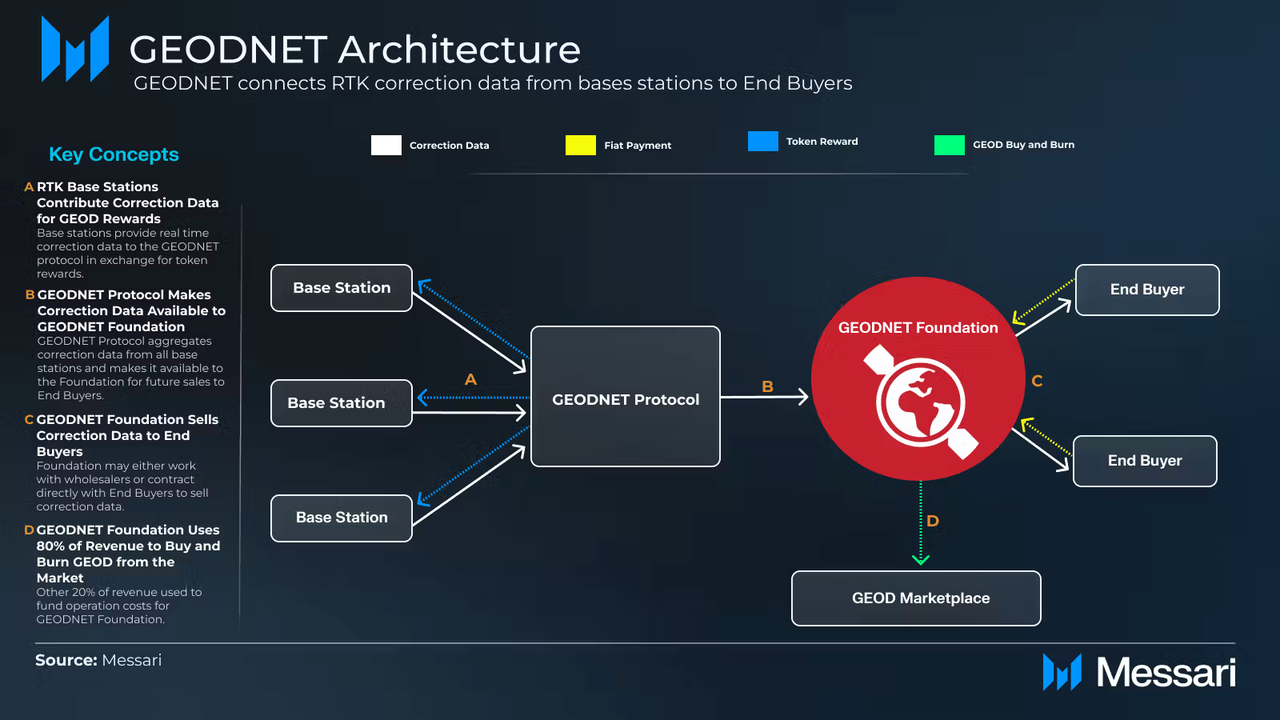
Bagaimana GEODNET Membangun Jaringan RTK Terdesentralisasi?
GEODNET menggabungkan jaringan RTK tradisional dengan model DePIN untuk menciptakan infrastruktur penentuan posisi presisi tinggi global. Alih-alih mengandalkan operator terpusat untuk membangun stasiun basis, GEODNET memungkinkan pengguna di seluruh dunia menyebarkan stasiun basis GNSS dan menghubungkannya ke jaringan. Operator node mendapatkan imbalan token GEOD dengan menyediakan data penentuan posisi berkualitas tinggi, sehingga mendorong pertumbuhan jaringan yang berkelanjutan.
Model ini menurunkan biaya infrastruktur sekaligus meningkatkan efisiensi cakupan dan ekspansi. Saat semakin banyak node bergabung, GEODNET dapat memberikan layanan penentuan posisi presisi tinggi ke semakin banyak wilayah.
Bagaimana Proses Penentuan Posisi RTK Tunggal Bekerja Di GEODNET?
Memahami GEODNET dimulai dengan mengikuti alur kerja penentuan posisi yang lengkap.
Langkah 1: Stasiun Basis Menerima Sinyal Satelit
Node GEODNET terus menerima sinyal dari beberapa sistem GNSS.
Langkah 2: Hitung Kesalahan Real-Time
Stasiun basis menghitung kesalahan sinyal satelit saat ini berdasarkan koordinat yang diketahui.
Langkah 3: Hasilkan Data Koreksi
Sistem mengubah kesalahan menjadi informasi koreksi RTK standar.
Langkah 4: Kirim Ke Perangkat Terminal
Data koreksi dikirim melalui internet ke drone, robot, atau kendaraan.
Langkah 5: Terminal Menyelesaikan Koreksi Penentuan Posisi
Perangkat menggunakan data koreksi untuk mengkalibrasi sinyal satelit, sehingga mencapai penentuan posisi tingkat sentimeter.
Seluruh proses ini berjalan secara terus menerus secara real time.
Industri Apa Saja Yang Terutama Menggunakan Teknologi RTK?
Penentuan posisi presisi tinggi telah menjadi infrastruktur penting untuk transformasi digital di berbagai industri.
Kendaraan Otonom
Kendaraan otonom bergantung pada penentuan posisi tingkat sentimeter untuk perencanaan jalur dan deteksi lajur.
Survei Drone
Drone survei menggunakan RTK untuk meningkatkan akurasi peta dan model 3D.
Pertanian Cerdas
Traktor otonom dan peralatan penanaman presisi bergantung pada navigasi presisi tinggi untuk operasi lapangan.
Robot Industri
Robot bergerak otonom membutuhkan penentuan posisi presisi untuk kontrol jalur dan tugas kolaboratif.
Komputasi Spasial
Sistem augmented reality dan digital twin membutuhkan data posisi yang akurat untuk membangun model spasial yang realistis.
Tantangan Apa Yang Dihadapi Teknologi RTK?
Meskipun akurasinya tinggi, RTK masih menghadapi keterbatasan praktis.
Pertama, kepadatan stasiun basis secara langsung memengaruhi kinerja penentuan posisi. Kedua, latensi komunikasi jaringan dapat memengaruhi ketepatan waktu data koreksi. Selain itu, halangan dan efek multipath di lingkungan perkotaan yang kompleks masih dapat menurunkan kualitas penentuan posisi. Seiring kemajuan teknologi GNSS multi-frekuensi dan perluasan jaringan stasiun basis global, masalah-masalah ini secara bertahap dapat diatasi.
Kesimpulan
RTK adalah salah satu teknologi penentuan posisi presisi tinggi yang paling banyak digunakan saat ini. Dengan mengoreksi kesalahan sinyal satelit secara real time, teknologi ini meningkatkan akurasi GNSS standar dari tingkat meter ke tingkat sentimeter. Pertumbuhan kendaraan otonom, drone, robotika, dan pertanian cerdas telah menjadikan RTK sebagai fondasi yang tak tergantikan bagi perangkat pintar di dunia nyata.
GEODNET menggabungkan teknologi RTK dengan model DePIN, menawarkan layanan penentuan posisi presisi tinggi melalui jaringan stasiun basis yang terdistribusi secara global. Berbeda dengan jaringan RTK terpusat tradisional, GEODNET menggunakan pendekatan berbasis komunitas untuk memperluas cakupan infrastruktur, sehingga penentuan posisi presisi tinggi dapat diakses dalam berbagai aplikasi yang lebih luas.
FAQ
Apa Itu Teknologi Penentuan Posisi RTK?
RTK (Real-Time Kinematic) adalah teknologi navigasi presisi tinggi yang menggunakan stasiun basis untuk mengoreksi kesalahan sinyal satelit secara real time, mencapai akurasi penentuan posisi tingkat sentimeter.
Apa Perbedaan Antara RTK Dan GPS?
GPS adalah sistem navigasi satelit, sedangkan RTK adalah teknologi penentuan posisi yang menggunakan sinyal GPS dan GNSS lainnya untuk koreksi kesalahan. Akurasi GPS standar biasanya dalam beberapa meter, sementara RTK mencapai akurasi tingkat sentimeter.
Mengapa RTK Lebih Akurat Daripada GPS Standar?
RTK menggunakan stasiun basis untuk menghitung dan mengirimkan koreksi kesalahan secara real time, sehingga menghilangkan sumber kesalahan utama seperti kesalahan orbit satelit dan penundaan atmosfer, menghasilkan akurasi yang jauh lebih tinggi.
Teknologi Penentuan Posisi Apa Yang Digunakan GEODNET?
GEODNET terutama bergantung pada teknologi GNSS dan RTK, menyediakan koreksi penentuan posisi real-time melalui jaringan stasiun basis global untuk mencapai navigasi tingkat sentimeter.
Apa Perbedaan Antara GEODNET Dan Jaringan RTK Tradisional?
GEODNET mengadopsi model DePIN, di mana komunitas global bersama-sama menyebarkan stasiun basis dan menerima insentif token, sedangkan jaringan RTK tradisional biasanya dibangun dan dipelihara secara terpusat oleh lembaga pemerintah atau operator komersial.
Perangkat Apa Yang Membutuhkan Penentuan Posisi RTK?
Drone, kendaraan otonom, mesin pertanian, robot industri, peralatan survei, dan beberapa terminal AR serta komputasi spasial semuanya membutuhkan kemampuan penentuan posisi presisi tinggi yang disediakan oleh RTK.