人工知能がその焦点をテキスト生成からロボット工学、自動運転、そして実世界との相互作用システムへと移行するにつれて、AIモデルは実世界の動作、視覚、環境フィードバックデータへの依存を強めています。
インターネット上のテキストデータと比較すると、こうしたロボットトレーニング用データは取得コストが高く、入手可能な規模も圧倒的に小さいため、具現化知能産業における主要なボトルネックとなっています。Caspiusが取り組む分野は、AIデータインフラ、DePIN、Physical AIが融合する重要な方向性を示しています。
Caspiusの起源と具現化AIの潮流
具現化AIとは、ロボットや自動運転車、インテリジェント機械システムなど、実世界を知覚し、行動し、相互作用できるAIシステムを指します。主にテキストを処理する従来の大規模言語モデルとは異なり、具現化AIは実世界から空間関係、動作ロジック、物理的フィードバックを学習しなければなりません。そのため、これらのシステムをトレーニングするには、はるかに多くの実世界の行動データが必要です。
近年、AI業界はインターネット上のテキストデータだけではロボット知能の進化に限界があると認識しています。ロボットモデルには言語理解だけでなく、「どのように行動するか」を学習する能力が求められます。例えば、ロボットが「コップを拾う」動作を習得するには、一人称視点の動画、動作軌跡、物理環境からのフィードバックなど、大量のトレーニングサンプルが必要です。
Caspiusは、オープンなデータネットワークを通じてこの課題を解決しようとしています。ブロックチェーンベースのインセンティブを活用し、ユーザーがロボットのトレーニングに使用可能なデータをアップロードするよう促すことで、具現化AIモデルが利用できるデータソースを拡大します。
Caspiusの仕組み
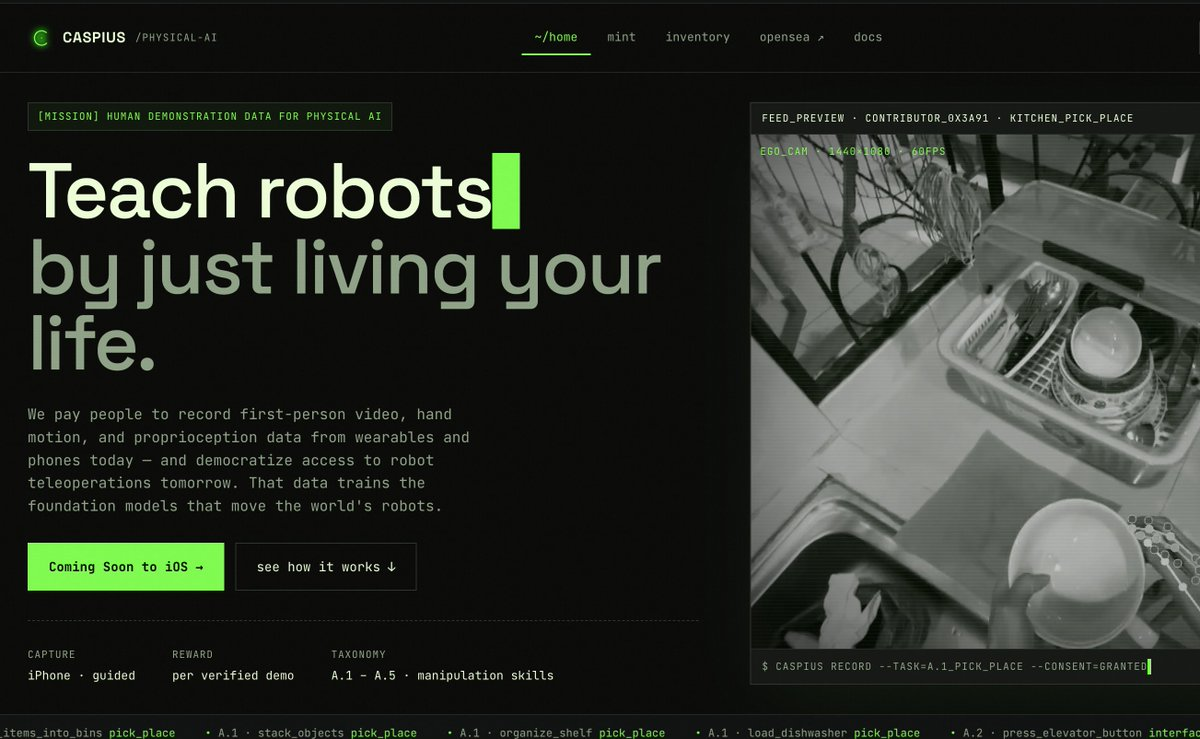
Caspiusのコアロジックは、オープンなデータ収集・検証ネットワークを構築することです。ユーザーは、一人称視点の動画、動作デモンストレーション、環境との相互作用ログ、センサーデータといった実世界の行動データをプラットフォームを通じてアップロードできます。検証を経た後、このデータはロボットAIモデルのトレーニングに利用されます。
プロセスは通常、以下のステップで構成されます:
- ユーザーが実世界の行動データを収集します。
- データがCaspiusネットワークにアップロードされます。
- ネットワークがデータの品質と信頼性を検証します。
- AI開発者またはモデルトレーニングプラットフォームがデータを取得します。
- データ提供者はCASインセンティブを受け取ります。
従来のAIデータプラットフォームと比較して、Caspiusはオープン性とデータ所有権をより重視しています。データ提供者は、中央集権的なプラットフォームがデータ収益を独占するのではなく、価値配分に直接参加します。
なぜCaspiusは実世界データを重視するのか
ロボットAIとテキスト生成モデルの主要な違いの一つは、ロボットAIが物理世界を理解する必要がある点です。テキストモデルは主に言語間の関係を学習しますが、ロボットシステムは動作の実行、空間配置、環境との相互作用を習得しなければなりません。
例えば、ロボットが「ドアを開ける」動作を学習する場合、ドアとは何かを知るだけでなく、以下を理解する必要があります:
- ドアハンドルの位置
- 手の動きの軌跡
- 必要な力と角度
- ドアを開けた後の空間フィードバック
こうした情報はテキストだけでは得られないため、実世界の行動データは具現化知能にとって不可欠なリソースです。
自動化デバイスやAIエージェントが実世界のアプリケーションにますます導入されるにつれ、ロボットトレーニングデータへの需要は拡大を続けています。Caspiusは、こうした需要に応えるスケーラブルなデータ供給ネットワークの構築を目指しています。
CASトークンの用途
CASはCaspiusネットワークのネイティブトークンであり、主にエコシステムのインセンティブとガバナンスを目的としています。
主な用途は以下の通りです:
| 機能 | 説明 |
|---|---|
| データ提供報酬 | 有効なトレーニングデータをアップロードすることで、ユーザーはCASインセンティブを獲得します。 |
| ネットワークガバナンス | トークンホルダーはプロトコルのガバナンスやパラメータ調整に参加できます。 |
| データ検証メカニズム | 一部の検証プロセスでは、ステーキングやインセンティブメカニズムが必要となる場合があります。 |
| エコシステム連携 | AIデータ市場や協力シナリオにおける価値移転に使用されます。 |
分散型AIインフラにおいて、トークンは支払手段としてだけでなく、ネットワーク参加者の利害を調整する役割も果たします。Caspiusは、CASを通じて長期的かつ持続可能なデータ提供システムを構築しようとしています。
Caspiusと従来のAIデータプラットフォームの違い
従来のAIデータプラットフォームは通常、中央集権的な企業が管理し、データ収集、配布、収益配分がプラットフォーム側に集中しています。一方、Caspiusはオープンネットワークとコミュニティ連携を重視します。
従来のAIデータプラットフォームとCaspiusの主な違いは以下の通りです:
| 次元 | Caspius | 従来のAIデータプラットフォーム |
|---|---|---|
| データ所有権 | 提供者の参加を重視 | 中央集権的なプラットフォームが管理 |
| インセンティブモデル | ブロックチェーントークンインセンティブ | プラットフォーム支払いモデル |
| データ透明性 | オンチェーンで検証可能 | ブラックボックス管理 |
| エコシステム構造 | オープンネットワーク | 中央集権的プラットフォーム |
| Web3統合 | オンチェーン連携をサポート | 通常ブロックチェーンを利用しない |
この違いにより、CaspiusはDePINおよびオープンAIインフラモデルに近い位置づけとなっています。
Caspiusが直面する課題
分散型AIデータネットワークには成長の可能性がある一方、Caspiusはいくつかの課題に直面しています。
まず、真正性です。ロボットトレーニングデータには高い精度が求められ、低品質または改ざんされたデータはモデルのトレーニング効果を損なう可能性があるため、堅牢な検証メカニズムが不可欠です。
次に、プライバシーとコンプライアンスです。実世界の動画や行動データには個人のプライバシー、環境情報、規制要件が含まれる可能性があり、法域ごとに法的基準が異なります。
さらに、AIデータ市場は競争が激しく、大手テクノロジー企業、AIラボ、従来のデータプラットフォームは独自のデータ収集能力を継続的に強化しています。
暗号資産として、CASの価格は市場の変動、業界サイクル、エコシステムの発展にも影響を受ける可能性があります。
結論
Caspius (CAS) は、具現化知能およびロボットAI向けの分散型データインフラプロトコルです。オープンネットワークを通じて実世界のトレーニングデータの供給を拡大することを目的としています。AIデータネットワーク、DePIN、Web3インセンティブメカニズムを組み合わせることで、ロボットトレーニングデータのためのよりオープンなエコシステムを構築しようとしています。
AI業界がテキストモデルから実世界との相互作用システムへと進化するにつれ、ロボットトレーニングデータの重要性はますます高まっています。Caspiusに代表される分散型データネットワークは、AIとブロックチェーンの融合における主要な方向性として注目されています。
よくある質問
CaspiusはAIプロジェクトですか、それともDePINプロジェクトですか?
CaspiusはAIインフラとDePINの両方の特性を備えており、AIとWeb3の交差点に位置するプロジェクトです。
CASトークンの用途は何ですか?
CASは主にデータ提供報酬、エコシステムガバナンス、データ検証、ネットワーク連携に使用されます。
なぜロボットAIには実世界データが必要なのですか?
ロボットシステムは、実際の環境からの動作、空間認識、物理的フィードバックを学習する必要があります。テキストデータだけでは、複雑な行動のトレーニングには通常不十分です。
Caspiusと従来のAIデータプラットフォームの違いは何ですか?
Caspiusはオープンネットワーク、データ提供インセンティブ、オンチェーン透明性を重視します。一方、従来のAIデータプラットフォームは通常、中央集権的なモデルで運営されています。
Caspiusにリスクはありますか?
Caspiusが事業を展開するAIデータインフラ分野はまだ初期段階にあります。プロジェクトの進展、データ需要の変化、暗号資産市場の変動はいずれもリスク要因となり得ます。
共有
内容


関連記事
Render、io.net、Akash:DePINハッシュレートネットワークの比較分析
AI分野におけるRenderの申請理由:分散型ハッシュレートが人工知能の発展を支える仕組み
SentioとThe Graph:リアルタイムインデックス機構とサブグラフインデックス機構の比較
USD.AI 収益源分析:AIインフラ借入資金による収益創出の仕組み
STトークンのユースケースとは?Sentioエコシステムにおけるインセンティブメカニズムを詳しく解説