A procura por posicionamento de alta precisão está a aumentar com o avanço das tecnologias de condução autónoma, drones, robótica e gémeos digitais. Embora a navegação GPS tradicional satisfaça as necessidades diárias, os erros ao nível do metro revelam-se frequentemente inadequados para aplicações automatizadas. Consequentemente, a tecnologia RTK — capaz de alcançar precisão ao nível do centímetro — está rapidamente a tornar-se uma infraestrutura essencial para dispositivos inteligentes.
Na indústria de posicionamento de alta precisão, o RTK emergiu como uma tecnologia central para topografia, automação agrícola, robótica industrial e sistemas de condução autónoma. A GEODNET aproveita um modelo de infraestrutura descentralizado para expandir os serviços RTK de redes regionais para uma escala global, fornecendo posicionamento de alta precisão a uma gama mais ampla de dispositivos e programadores.
O que é a tecnologia de posicionamento RTK?
O RTK (Real-Time Kinematic) é uma tecnologia que alcança posicionamento de alta precisão ao medir a fase da portadora dos sinais de navegação por satélite.
Os recetores GNSS padrão calculam habitualmente a posição diretamente a partir dos sinais transmitidos pelos satélites, com uma precisão geralmente dentro de alguns metros. O RTK, no entanto, introduz uma estação base fixa que calcula os erros em tempo real e transmite dados de correção para terminais móveis, melhorando drasticamente a precisão do posicionamento.
Ao reduzir o erro de posicionamento do nível do metro para o nível do centímetro, o RTK é amplamente adotado em cenários que exigem navegação e topografia de alta precisão.
Porque é que o GPS padrão produz erros de posicionamento?
Os erros de posicionamento do GPS padrão decorrem de uma combinação de vários fatores.
Erros de órbita dos satélites
Os satélites podem sofrer desvios orbitais durante o funcionamento, levando a imprecisões no cálculo da posição.
Atrasos ionosféricos e troposféricos
Os sinais dos satélites que atravessam a atmosfera são afetados pela ionosfera e pela troposfera, alterando a sua velocidade de propagação.
Efeito de multitrajeto
Os sinais refletidos por edifícios, montanhas ou solo antes de atingirem o recetor podem fazer com que as medições se desviem da posição real.
Erros do recetor
As diferenças no desempenho do hardware e nas capacidades algorítmicas entre dispositivos também afetam o resultado final do posicionamento.
A acumulação destes erros mantém geralmente a precisão do GPS padrão dentro de uma gama de vários metros.
Como é que o RTK alcança posicionamento ao nível do centímetro?
O núcleo do RTK reside na utilização de uma estação base para fornecer correções de erros em tempo real.
A estação base é instalada numa coordenada precisamente conhecida, permitindo-lhe calcular com exatidão a diferença entre os sinais de satélite recebidos e os seus valores teóricos. Estas diferenças são convertidas em dados de correção e transmitidas através de uma rede para dispositivos móveis próximos. Ao receber os sinais dos satélites, o dispositivo móvel recebe também estes dados de correção, eliminando assim a maioria dos erros e alcançando precisão ao nível do centímetro.
Este processo é normalmente concluído em segundos, daí o nome "posicionamento cinemático em tempo real".
Qual é a diferença entre GNSS, GPS e RTK?
Muitos utilizadores confundem GNSS, GPS e RTK, mas estes termos operam a níveis conceptuais diferentes.
O GNSS é o Sistema Global de Navegação por Satélite
O GNSS (Global Navigation Satellite System) é o termo genérico para todos os sistemas globais de navegação por satélite.
Os principais sistemas atualmente incluem:
- GPS (Estados Unidos)
- GLONASS (Rússia)
- Galileo (União Europeia)
- BeiDou (China)
O GPS é um componente do GNSS
O GPS é um dos sistemas de navegação por satélite mais antigos e mais amplamente utilizados.
Na linguagem quotidiana, "navegação GPS" refere-se tipicamente a dispositivos que na realidade recebem sinais de vários sistemas GNSS.
O RTK é uma tecnologia de posicionamento de alta precisão
O RTK não é um sistema de satélites, mas sim um método de posicionamento que efetua correção de erros com base em sinais GNSS.
Assim, a distinção é: o GNSS fornece os sinais de satélite; o GPS é um desses sistemas GNSS; o RTK utiliza esses sinais para alcançar posicionamento ao nível do centímetro.
Que componentes constituem uma rede RTK?
Um sistema RTK completo é tipicamente composto por vários componentes que funcionam em conjunto.
Estação base
A estação base recebe continuamente sinais de satélite e calcula erros.
Servidor de dados de correção
O servidor processa os dados da estação base e gera informação de correção normalizada.
Rede de comunicação
A internet ou um sistema de comunicação sem fios transmite os dados de correção para os dispositivos terminais.
Terminal móvel
O terminal móvel é o dispositivo que utiliza o serviço de posicionamento — como um drone, robô ou veículo autónomo.
Estes componentes formam em conjunto a arquitetura do serviço de posicionamento RTK.
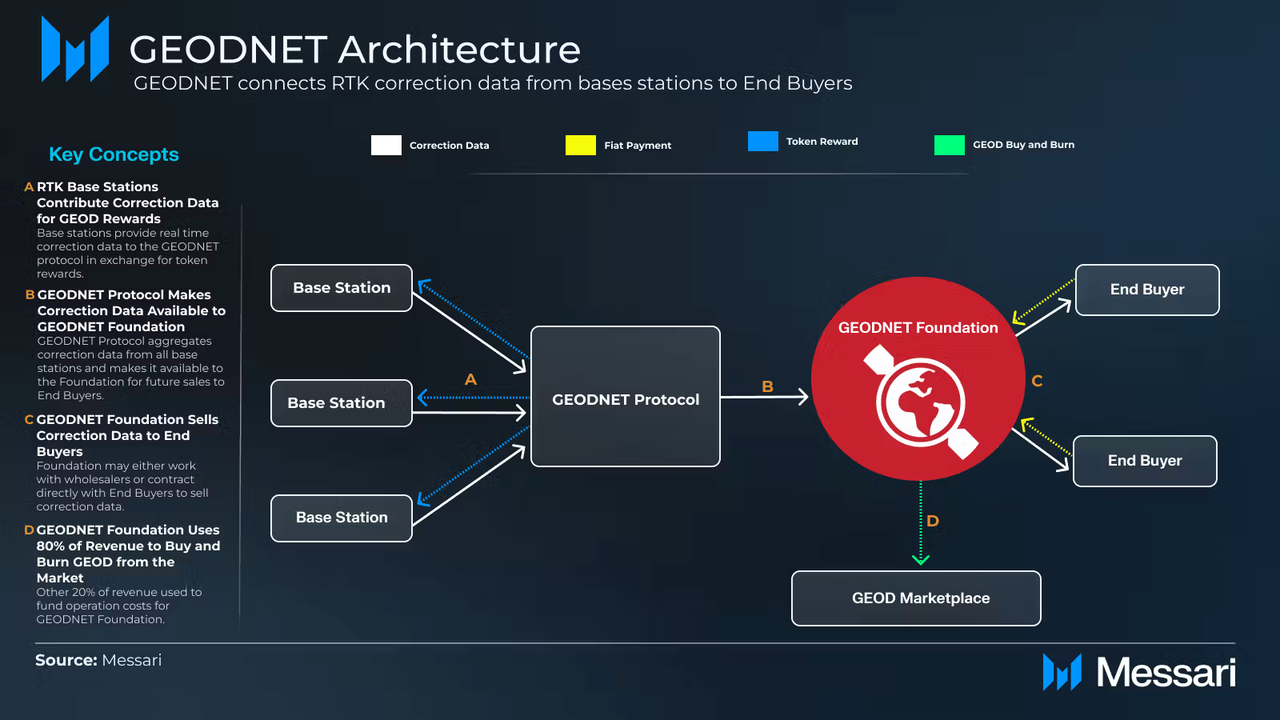
Como é que a GEODNET constrói uma rede RTK descentralizada?
A GEODNET funde as redes RTK tradicionais com o modelo DePIN para criar uma infraestrutura global de posicionamento de alta precisão. Em vez de depender de operadores centralizados para construir estações base, a GEODNET permite que utilizadores em todo o mundo implementem estações base GNSS e as liguem à rede. Os operadores de nodos ganham recompensas em tokens GEOD ao fornecer dados de posicionamento de alta qualidade, alimentando o crescimento contínuo da rede.
Este modelo reduz os custos de infraestrutura ao mesmo tempo que melhora a cobertura e a eficiência de expansão. À medida que mais nodos se juntam, a GEODNET pode fornecer serviços de posicionamento de alta precisão a um número crescente de regiões.
Como é que um processo de posicionamento RTK individual funciona na GEODNET?
Compreender a GEODNET começa por seguir um fluxo de trabalho de posicionamento completo.
Passo 1: A estação base recebe sinais de satélite
Os nodos da GEODNET recebem continuamente sinais de vários sistemas GNSS.
Passo 2: Calcular o erro em tempo real
A estação base calcula o erro atual do sinal de satélite com base nas suas coordenadas conhecidas.
Passo 3: Gerar dados de correção
O sistema converte o erro em informação de correção RTK padrão.
Passo 4: Enviar para o dispositivo terminal
Os dados de correção são transmitidos pela internet para drones, robôs ou veículos.
Passo 5: O terminal conclui a correção de posicionamento
O dispositivo utiliza os dados de correção para calibrar os sinais de satélite, alcançando posicionamento ao nível do centímetro.
Todo este processo decorre continuamente em tempo real.
Que indústrias utilizam principalmente a tecnologia RTK?
O posicionamento de alta precisão tornou-se uma infraestrutura crítica para a transformação digital em muitas indústrias.
Condução autónoma
Os veículos autónomos dependem de posicionamento ao nível do centímetro para planeamento de trajetos e deteção de faixas.
Topografia com drones
Os drones de topografia utilizam RTK para melhorar a precisão de mapas e modelos 3D.
Agricultura inteligente
Os tratores autónomos e os equipamentos de sementeira de precisão dependem de navegação de alta precisão para operações no campo.
Robôs industriais
Os robôs móveis autónomos necessitam de posicionamento preciso para controlo de trajetória e tarefas colaborativas.
Computação espacial
Os sistemas de realidade aumentada e gémeos digitais precisam de dados de posição precisos para construir modelos espaciais realistas.
Que desafios enfrenta a tecnologia RTK?
Apesar da sua elevada precisão, o RTK ainda enfrenta limitações práticas.
Em primeiro lugar, a densidade das estações base impacta diretamente o desempenho do posicionamento. Em segundo lugar, a latência da comunicação de rede pode afetar a atualidade dos dados de correção. Além disso, obstruções e efeitos de multitrajeto em ambientes urbanos complexos podem ainda degradar a qualidade do posicionamento. À medida que a tecnologia GNSS multifrequência avança e as redes globais de estações base se expandem, estes problemas estão gradualmente a ser mitigados.
Conclusão
O RTK é uma das tecnologias de posicionamento de alta precisão mais amplamente implementadas atualmente. Ao corrigir os erros dos sinais de satélite em tempo real, eleva a precisão do GNSS padrão do nível do metro para o nível do centímetro. O crescimento da condução autónoma, drones, robótica e agricultura inteligente tornou o RTK uma base indispensável para dispositivos inteligentes no mundo real.
A GEODNET combina a tecnologia RTK com o modelo DePIN, oferecendo serviços de posicionamento de alta precisão através de uma rede global de estações base distribuídas. Em contraste com as redes RTK centralizadas tradicionais, a GEODNET utiliza uma abordagem orientada pela comunidade para expandir a cobertura de infraestrutura, tornando o posicionamento de alta precisão acessível numa gama mais ampla de aplicações.
Perguntas Frequentes
O que é a tecnologia de posicionamento RTK?
O RTK (Real-Time Kinematic) é uma tecnologia de navegação de alta precisão que utiliza uma estação base para corrigir erros de sinais de satélite em tempo real, alcançando precisão de posicionamento ao nível do centímetro.
Qual é a diferença entre RTK e GPS?
O GPS é um sistema de navegação por satélite, enquanto o RTK é uma tecnologia de posicionamento que utiliza o GPS e outros sinais GNSS para correção de erros. A precisão do GPS padrão é tipicamente de alguns metros; o RTK alcança precisão ao nível do centímetro.
Porque é que o RTK é mais preciso do que o GPS padrão?
O RTK utiliza uma estação base para calcular e transmitir correções de erros em tempo real, eliminando as principais fontes de erro, como erros de órbita de satélite e atrasos atmosféricos, resultando numa precisão significativamente maior.
Que tecnologia de posicionamento utiliza a GEODNET?
A GEODNET baseia-se principalmente na tecnologia GNSS e RTK, fornecendo correções de posicionamento em tempo real através de uma rede global de estações base para alcançar navegação ao nível do centímetro.
Qual é a diferença entre a GEODNET e as redes RTK tradicionais?
A GEODNET adota o modelo DePIN, no qual uma comunidade global implementa conjuntamente estações base e recebe incentivos em tokens, enquanto as redes RTK tradicionais são tipicamente construídas e mantidas de forma centralizada por agências governamentais ou operadores comerciais.
Que dispositivos necessitam de posicionamento RTK?
Drones, veículos autónomos, maquinaria agrícola, robôs industriais, equipamentos de topografia e alguns terminais de RA e computação espacial necessitam das capacidades de posicionamento de alta precisão que o RTK proporciona.