Спрос на высокоточное позиционирование стремительно растет вместе с развитием автономного вождения, дронов, робототехники и технологий цифровых двойников. Хотя обычная GPS-навигация решает повседневные задачи, погрешность в несколько метров часто оказывается неприемлемой для автоматизированных систем. Именно поэтому технология RTK, обеспечивающая точность до сантиметров, быстро становится ключевой инфраструктурой для умных устройств.
В индустрии высокоточного позиционирования RTK зарекомендовала себя как основная технология для геодезии, автоматизации сельского хозяйства, промышленных роботов и систем автономного вождения. GEODNET использует децентрализованную модель инфраструктуры, чтобы расширить услуги RTK с региональных сетей на глобальный уровень и предоставить высокоточное позиционирование большему числу устройств и разработчиков.
Что такое технология позиционирования RTK?
RTK (Real-Time Kinematic) — это технология, которая позволяет достичь высокой точности позиционирования за счет измерения несущей фазы спутниковых навигационных сигналов.
Стандартные GNSS-приемники обычно рассчитывают положение напрямую по сигналам спутников, и точность при этом составляет несколько метров. RTK же использует неподвижную базовую станцию: она в реальном времени вычисляет ошибки и передает поправочные данные на мобильные терминалы, что кардинально повышает точность.
Уменьшая погрешность позиционирования с метрового до сантиметрового уровня, RTK широко применяется в задачах, где требуется высочайшая точность навигации и съемки.
Почему стандартный GPS дает ошибки позиционирования?
Ошибки стандартного GPS возникают из-за сочетания нескольких факторов.
Ошибки спутниковой орбиты
Спутники могут отклоняться от расчетной орбиты во время работы, что приводит к неточностям при вычислении положения.
Задержки в ионосфере и тропосфере
Спутниковые сигналы, проходя через атмосферу, испытывают влияние ионосферы и тропосферы, из-за чего меняется скорость их распространения.
Многолучевость
Сигналы, отраженные от зданий, гор или земли, прежде чем достигнуть приемника, могут искажать истинное положение объекта.
Ошибки приемника
Различия в аппаратной производительности и алгоритмах разных устройств также влияют на конечный результат.
Совокупность этих ошибок обычно удерживает точность стандартного GPS в диапазоне нескольких метров.
Как RTK достигает сантиметровой точности?
Суть RTK заключается в использовании базовой станции для предоставления поправок в реальном времени.
Базовая станция устанавливается в точке с точно известными координатами. Это позволяет ей точно вычислить разницу между полученными спутниковыми сигналами и их теоретическими значениями. Эти разности преобразуются в поправочные данные и передаются по сети на ближайшие мобильные устройства. Принимая спутниковые сигналы, мобильное устройство одновременно получает поправки, которые устраняют большинство ошибок и обеспечивают сантиметровую точность.
Весь процесс занимает секунды, поэтому технология и называется «кинематика реального времени».
В чем разница между GNSS, GPS и RTK?
Многие путают эти понятия, хотя они находятся на разных концептуальных уровнях.
GNSS — это глобальная навигационная спутниковая система
GNSS (Global Navigation Satellite System) — общий термин для всех глобальных спутниковых навигационных систем.
Основные системы на сегодня:
- GPS (США)
- ГЛОНАСС (Россия)
- Galileo (Европейский союз)
- BeiDou (Китай)
GPS — это часть GNSS
GPS — одна из самых старых и широко используемых спутниковых навигационных систем.
В быту под «GPS-навигацией» обычно понимают устройства, которые на самом деле принимают сигналы от нескольких систем GNSS.
RTK — это технология высокоточного позиционирования
RTK — не спутниковая система, а метод позиционирования, который выполняет коррекцию ошибок на основе сигналов GNSS.
Коротко: GNSS предоставляет спутниковые сигналы, GPS — одна из систем GNSS, а RTK использует эти сигналы для достижения сантиметровой точности.
Из каких компонентов состоит сеть RTK?
Полноценная система RTK обычно включает несколько компонентов, работающих вместе.
Базовая станция
Она непрерывно принимает спутниковые сигналы и вычисляет ошибки.
Сервер поправочных данных
Сервер обрабатывает данные с базовой станции и формирует стандартизированную поправочную информацию.
Сеть связи
Интернет или беспроводная система передают поправочные данные на терминальные устройства.
Роверный терминал
Ровер — это устройство, которое использует сервис позиционирования: дрон, робот или автономный автомобиль.
Эти элементы образуют архитектуру сервиса RTK-позиционирования.
Как GEODNET строит децентрализованную сеть RTK?
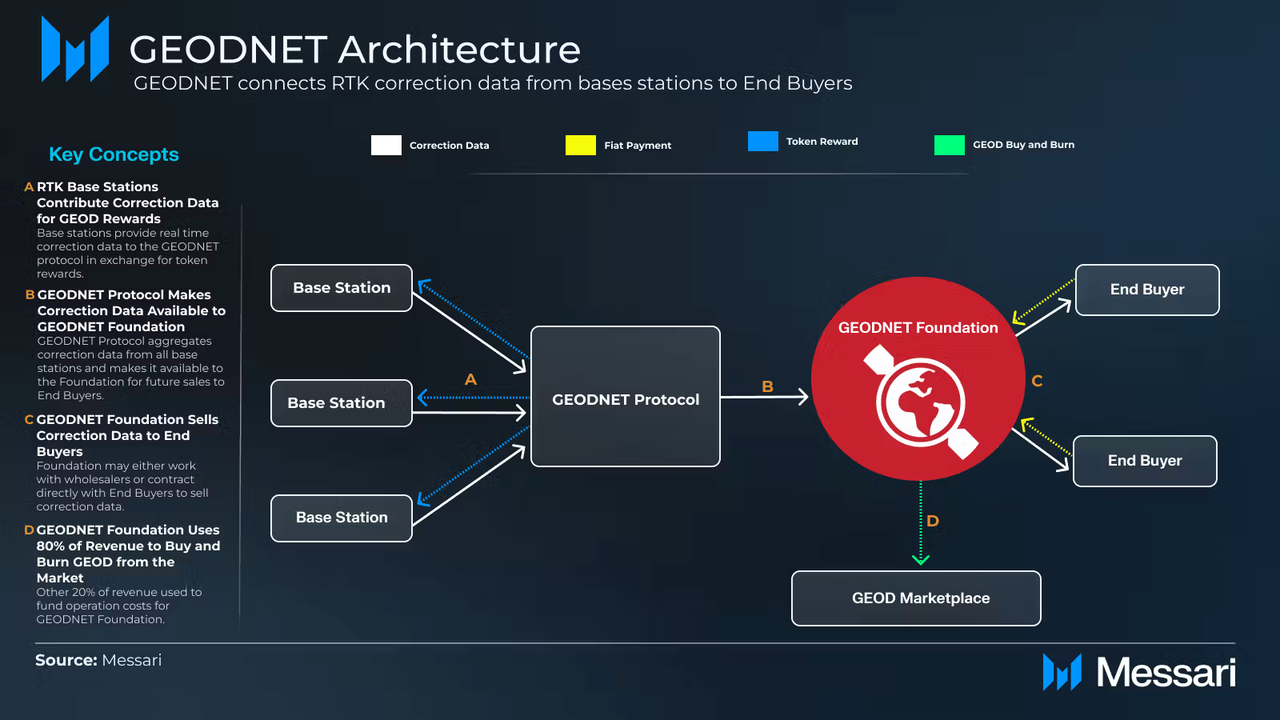
GEODNET объединяет традиционные сети RTK с моделью DePIN, создавая глобальную инфраструктуру высокоточного позиционирования. Вместо того чтобы полагаться на централизованных операторов, GEODNET позволяет пользователям по всему миру развертывать собственные GNSS-базовые станции и подключать их к сети. Операторы узлов получают вознаграждение в токенах GEOD за предоставление качественных данных, что стимулирует непрерывный рост сети.
Такая модель снижает затраты на инфраструктуру и одновременно улучшает покрытие и эффективность расширения. С каждым новым узлом GEODNET может предоставлять высокоточное позиционирование всё новым регионам.
Как проходит единый процесс RTK-позиционирования на GEODNET?
Чтобы понять GEODNET, достаточно проследить полный цикл позиционирования.
Шаг 1: Базовая станция принимает спутниковые сигналы
Узлы GEODNET непрерывно принимают сигналы от нескольких систем GNSS.
Шаг 2: Вычисление ошибки в реальном времени
Базовая станция рассчитывает текущую ошибку спутникового сигнала, исходя из своих известных координат.
Шаг 3: Формирование поправочных данных
Система преобразует ошибку в стандартную поправочную информацию RTK.
Шаг 4: Передача на терминальное устройство
Поправочные данные передаются через интернет на дроны, роботы или автомобили.
Шаг 5: Терминал выполняет коррекцию
Устройство использует поправки для калибровки спутниковых сигналов и достигает сантиметровой точности.
Весь этот процесс выполняется непрерывно в реальном времени.
В каких отраслях в основном применяется RTK?
Высокоточное позиционирование стало критически важной инфраструктурой для цифровой трансформации многих отраслей.
Автономное вождение
Автономные автомобили полагаются на сантиметровую точность для планирования маршрута и определения полос движения.
Дрон-съемка
Геодезические дроны используют RTK для повышения точности карт и 3D-моделей.
Умное сельское хозяйство
Автономные тракторы и оборудование для точного сева нуждаются в высокоточной навигации для полевых работ.
Промышленные роботы
Автономные мобильные роботы требуют точного позиционирования для управления траекторией и совместной работы.
Пространственные вычисления
Системы дополненной реальности и цифровые двойники нуждаются в точных данных о положении для построения реалистичных пространственных моделей.
С какими проблемами сталкивается RTK?
Несмотря на высокую точность, у RTK есть практические ограничения.
Во-первых, плотность размещения базовых станций напрямую влияет на качество позиционирования. Во-вторых, задержки в сети могут снижать своевременность поправочных данных. Кроме того, в сложных городских условиях препятствия и многолучевость всё еще могут ухудшать точность. С развитием многочастотных GNSS-технологий и расширением глобальных сетей базовых станций эти проблемы постепенно решаются.
Заключение
RTK — одна из наиболее распространенных технологий высокоточного позиционирования на сегодняшний день. Корректируя ошибки спутниковых сигналов в реальном времени, она повышает точность стандартного GNSS с метрового до сантиметрового уровня. Развитие автономного вождения, дронов, робототехники и умного сельского хозяйства сделало RTK незаменимой основой для интеллектуальных устройств в реальном мире.
GEODNET объединяет RTK с моделью DePIN, предлагая услуги высокоточного позиционирования через глобально распределенную сеть базовых станций. В отличие от традиционных централизованных сетей RTK, GEODNET использует подход, управляемый сообществом, чтобы расширять инфраструктурное покрытие и делать высокоточное позиционирование доступным в большем числе приложений.
Часто задаваемые вопросы
Что такое технология позиционирования RTK?
RTK (Real-Time Kinematic) — это технология высокоточной навигации, которая использует базовую станцию для коррекции ошибок спутниковых сигналов в реальном времени, обеспечивая точность позиционирования до сантиметров.
В чем разница между RTK и GPS?
GPS — это спутниковая навигационная система, а RTK — технология позиционирования, которая использует сигналы GPS и других GNSS-систем для коррекции ошибок. Точность стандартного GPS составляет несколько метров; RTK достигает сантиметровой точности.
Почему RTK точнее стандартного GPS?
RTK использует базовую станцию для вычисления и передачи поправок в реальном времени, устраняя основные источники ошибок — орбитальные погрешности и атмосферные задержки. Это дает значительно более высокую точность.
Какую технологию позиционирования использует GEODNET?
GEODNET в основном опирается на технологии GNSS и RTK, предоставляя поправки позиционирования в реальном времени через глобальную сеть базовых станций для достижения сантиметровой навигации.
В чем разница между GEODNET и традиционными сетями RTK?
GEODNET использует модель DePIN, в которой глобальное сообщество совместно развертывает базовые станции и получает токен-стимулы, тогда как традиционные сети RTK обычно строятся и обслуживаются централизованно государственными или коммерческими операторами.
Каким устройствам нужно RTK-позиционирование?
Дроны, автономные автомобили, сельскохозяйственная техника, промышленные роботы, геодезическое оборудование, а также некоторые терминалы дополненной реальности и пространственных вычислений нуждаются в высокоточном позиционировании, которое дает RTK.