Попит на високоточне позиціонування злітає вгору разом із розвитком автономного водіння, дронів, робототехніки та цифрових двійників. Звичайна GPS-навігація закриває повсякденні потреби, але метрівні похибки часто не проходять для автоматизованих систем. Тому технологія RTK із точністю до сантиметра дедалі швидше стає базовою інфраструктурою для розумних пристроїв.
У сфері високоточного позиціонування RTK зарекомендувала себе як ключова технологія для геодезії, автоматизації сільського господарства, промислових роботів та автономних транспортних засобів. GEODNET застосовує децентралізовану інфраструктурну модель, щоб вивести послуги RTK із регіональних мереж на глобальний рівень — надаючи високоточне позиціонування ширшому колу пристроїв і розробників.
Що таке технологія позиціонування RTK?
RTK (кінематика реального часу) — це технологія, яка забезпечує високоточне позиціонування через вимірювання фази несучої супутникових навігаційних сигналів.
Стандартні приймачі GNSS зазвичай визначають положення безпосередньо з супутникових сигналів, даючи точність у межах кількох метрів. RTK натомість використовує фіксовану базову станцію, яка в реальному часі обчислює похибки та передає коригувальні дані на мобільні термінали. Це кардинально підвищує точність позиціонування.
Зменшуючи похибку з метрового до сантиметрового рівня, RTK широко застосовують там, де потрібна високоточна навігація та геодезія.
Чому стандартний GPS дає похибки позиціонування?
Похибки стандартного GPS-позиціонування виникають через поєднання кількох чинників.
Похибки орбіт супутників
Супутники можуть відхилятися від орбіти під час роботи, що призводить до неточностей у розрахунку положення.
Затримки в іоносфері та тропосфері
Супутникові сигнали, проходячи крізь атмосферу, зазнають впливу іоносфери та тропосфери, що змінює швидкість їхнього поширення.
Багатошляховий ефект
Сигнали, відбиті від будівель, гір або землі, перш ніж потрапити на приймач, можуть спричинити відхилення вимірювань від справжнього положення.
Похибки приймача
Відмінності в продуктивності обладнання та алгоритмах різних пристроїв також впливають на кінцевий результат позиціонування.
Накопичення цих похибок зазвичай тримає точність стандартного GPS у межах кількох метрів.
Як RTK досягає сантиметрового позиціонування?
Суть RTK — у використанні базової станції для надання коригувань похибок у реальному часі.
Базову станцію встановлюють у точці з точно відомими координатами. Це дозволяє їй точно обчислювати різницю між отриманими супутниковими сигналами та їхніми теоретичними значеннями. Ці різниці перетворюють на коригувальні дані й передають через мережу на мобільні пристрої поблизу. Отримуючи супутникові сигнали, мобільний пристрій також приймає ці коригувальні дані, усуваючи більшість похибок і досягаючи сантиметрової точності.
Цей процес зазвичай триває лічені секунди, звідси й назва «кінематика реального часу».
У чому різниця між GNSS, GPS та RTK?
Багато користувачів плутають GNSS, GPS та RTK, але ці терміни діють на різних концептуальних рівнях.
GNSS — це глобальна навігаційна супутникова система
GNSS (Global Navigation Satellite System) — загальний термін для всіх глобальних навігаційних супутникових систем.
Основними системами наразі є:
- GPS (США)
- GLONASS (Росія)
- Galileo (Європейський Союз)
- BeiDou (Китай)
GPS — це складова GNSS
GPS — одна з найстаріших і найпоширеніших супутникових навігаційних систем.
У повсякденній мові «GPS-навігація» зазвичай означає пристрої, які фактично приймають сигнали від кількох систем GNSS.
RTK — це технологія високоточного позиціонування
RTK — не супутникова система, а метод позиціонування, який виконує корекцію похибок на основі сигналів GNSS.
Отже, різниця така: GNSS надає супутникові сигнали; GPS — одна з таких систем GNSS; RTK використовує ці сигнали для сантиметрового позиціонування.
Які компоненти складають мережу RTK?
Повна система RTK зазвичай складається з кількох компонентів, які працюють узгоджено.
Базова станція
Базова станція безперервно приймає супутникові сигнали та обчислює похибки.
Сервер коригувальних даних
Сервер обробляє дані базової станції та генерує стандартизовану коригувальну інформацію.
Комунікаційна мережа
Інтернет або бездротова система зв’язку передають коригувальні дані на кінцеві пристрої.
Рухомий термінал (ровер)
Ровер — пристрій, який використовує послугу позиціонування: дрон, робот або автономний транспортний засіб.
Ці компоненти разом утворюють архітектуру послуг позиціонування RTK.
Як GEODNET будує децентралізовану мережу RTK?
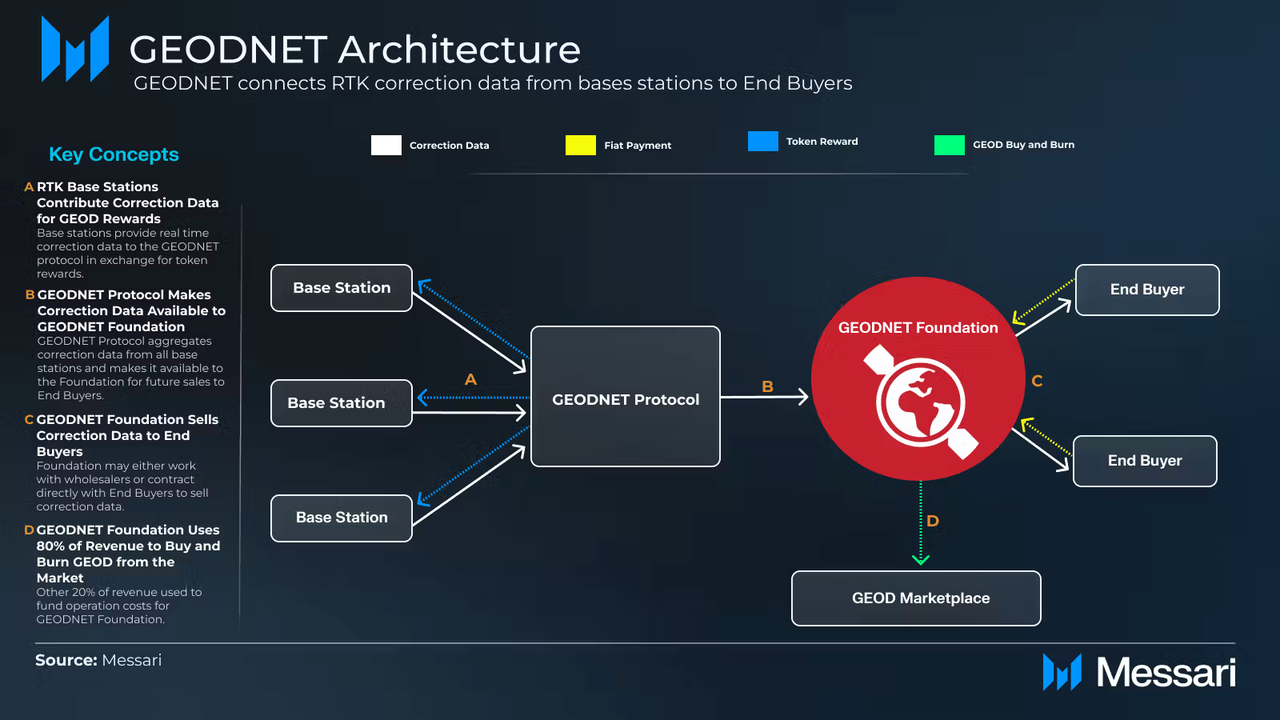
GEODNET поєднує традиційні мережі RTK із моделлю DePIN, створюючи глобальну інфраструктуру високоточного позиціонування. Замість централізованих операторів, які будують базові станції, GEODNET дозволяє користувачам по всьому світу розгортати GNSS-базові станції та підключати їх до мережі. Оператори нод отримують винагороду в токенах GEOD за якісні дані позиціонування, що стимулює постійне зростання мережі.
Така модель знижує витрати на інфраструктуру та водночас покращує покриття й ефективність розширення. Зі збільшенням кількості нод GEODNET може надавати послуги високоточного позиціонування дедалі більшій кількості регіонів.
Як працює один процес RTK-позиціонування в мережі GEODNET?
Щоб зрозуміти GEODNET, варто простежити повний робочий процес позиціонування.
Крок 1: Базова станція приймає супутникові сигнали
Ноди GEODNET безперервно приймають сигнали від кількох систем GNSS.
Крок 2: Обчислення похибки в реальному часі
Базова станція обчислює поточну похибку супутникового сигналу на основі своїх відомих координат.
Крок 3: Генерація коригувальних даних
Система перетворює похибку на стандартну коригувальну інформацію RTK.
Крок 4: Відправлення на кінцевий пристрій
Коригувальні дані передаються через інтернет на дрони, роботів або транспортні засоби.
Крок 5: Кінцевий пристрій виконує корекцію позиціонування
Пристрій використовує коригувальні дані для калібрування супутникових сигналів і досягає сантиметрового позиціонування.
Весь цей процес виконується безперервно в реальному часі.
Які галузі переважно використовують технологію RTK?
Високоточне позиціонування стало критично важливою інфраструктурою для цифрової трансформації в багатьох галузях.
Автономне водіння
Автономні транспортні засоби покладаються на сантиметрове позиціонування для планування маршруту та визначення смуг руху.
Дронова геодезія
Геодезичні дрони використовують RTK для підвищення точності карт і 3D-моделей.
Розумне сільське господарство
Автономні трактори та обладнання для точного висіву залежать від високоточної навігації під час польових робіт.
Промислові роботи
Автономні мобільні роботи потребують точного позиціонування для контролю маршруту та спільних завдань.
Просторові обчислення
Системи доповненої реальності та цифрових двійників потребують точних даних про положення для побудови реалістичних просторових моделей.
З якими викликами стикається технологія RTK?
Попри високу точність, RTK має практичні обмеження.
По-перше, щільність базових станцій безпосередньо впливає на якість позиціонування. По-друге, затримка мережевого зв’язку може впливати на своєчасність коригувальних даних. Крім того, перешкоди та багатошляховий ефект у складних міських умовах можуть погіршувати якість позиціонування. З розвитком багаточастотних технологій GNSS і розширенням глобальних мереж базових станцій ці проблеми поступово вирішують.
Висновок
RTK — одна з найбільш поширених технологій високоточного позиціонування сьогодні. Виправляючи похибки супутникових сигналів у реальному часі, вона підвищує точність стандартного GNSS із метрового до сантиметрового рівня. Зростання автономного водіння, дронів, робототехніки та розумного сільського господарства зробило RTK незамінною основою для інтелектуальних пристроїв у реальному світі.
GEODNET поєднує технологію RTK із моделлю DePIN, пропонуючи послуги високоточного позиціонування через глобально розподілену мережу базових станцій. На відміну від традиційних централізованих мереж RTK, GEODNET використовує підхід, керований спільнотою, для розширення інфраструктурного покриття, роблячи високоточне позиціонування доступним для ширшого кола застосунків.
Поширені запитання
Що таке технологія позиціонування RTK?
RTK (кінематика реального часу) — це технологія високоточної навігації, яка використовує базову станцію для корекції похибок супутникових сигналів у реальному часі та досягає точності позиціонування на рівні сантиметрів.
У чому різниця між RTK та GPS?
GPS — супутникова навігаційна система, а RTK — технологія позиціонування, яка використовує сигнали GPS та інших GNSS для корекції похибок. Точність стандартного GPS зазвичай становить кілька метрів; RTK дає сантиметрову точність.
Чому RTK точніший за стандартний GPS?
RTK використовує базову станцію для обчислення та передачі корекцій похибок у реальному часі, усуваючи основні джерела похибок, як-от орбітальні похибки супутників і атмосферні затримки. Це забезпечує значно вищу точність.
Яку технологію позиціонування використовує GEODNET?
GEODNET переважно покладається на технології GNSS та RTK, надаючи корекції позиціонування в реальному часі через глобальну мережу базових станцій для сантиметрової навігації.
У чому різниця між GEODNET та традиційними мережами RTK?
GEODNET використовує модель DePIN, де глобальна спільнота спільно розгортає базові станції та отримує токенну винагороду. Традиційні мережі RTK зазвичай будують і підтримують централізовано — державні установи або комерційні оператори.
Які пристрої потребують RTK-позиціонування?
Дрони, автономні транспортні засоби, сільськогосподарська техніка, промислові роботи, геодезичне обладнання, а також деякі термінали доповненої реальності та просторових обчислень — усі вони потребують високоточного позиціонування, яке забезпечує RTK.